
Rotary vane steering gear
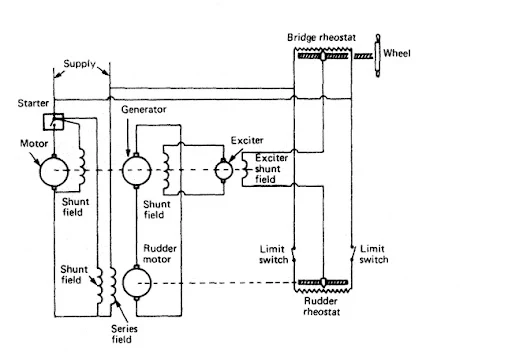
A continuously running motor-generator set has a directly coupled exciter to provide the field current of the generator. The exciter field is part of a control circuit, although in some circuits control is directly to the field current of the generator with the exciter omitted, When the control system is balanced there is no exciter field, no exciter output and no generator output, although it is continuously running.

The main motor which drives the rudder has no input and thus is stationary. When the wheel on the bridge is turned, and the rheostat contact is moved, the control system is unbalanced and a voltage occurs in the exciter field, the exciter, and the generator field.
The generator then produces power which turns the rudder motor and hence the rudder, As the rudder moves it returns the rudder rheostat contact to the same position as the bridge rheostat, bringing the system into balance and stopping all current flow.
In the single motor system, the motor which drives the rudder is supplied directly from the ship's mains through a contactor-type starter. Reversing contacts are also fitted to enable port or starboard movements.
The motor runs at full speed until stopped by the control system, so a braking system is necessary to bring the rudder to a stop quickly and at the desired position. The usual electrical maintenance work will be necessary on this equipment to ensure satisfactory operation.
Read Also ➤ Telemotor Control
.png)

Post a Comment